ATB230222AS11 Equipo de almacenamiento para palets automatizado Didatic Equipment Electrical Engineering Lab Equipment
- Descripción general del producto
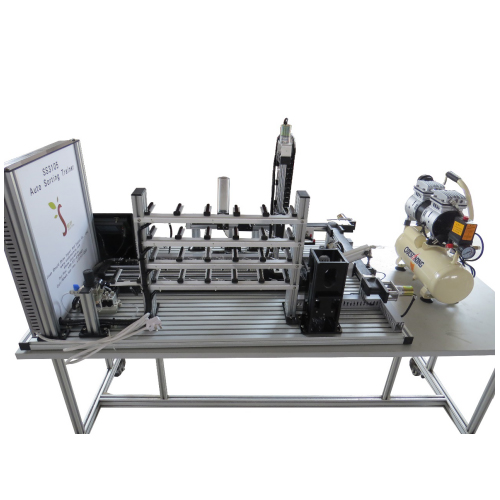
1.1 Resumen
Este dispositivo de entrenamiento se compone principalmente de varios tipos de sensores industriales, unidades de control neumático, interruptores eléctricos, controladores lógicos programables PLC, interfaces hombre-máquina, etc. Consta de unidades de silo, módulos de cinta transportadora, sensores RFID, módulos de manejo de ventosas de vacío , Una plataforma mecánica de equipos de mecatrónica compuesta por módulos de manejo de manipuladores de dos ejes, módulos de almacenamiento tridimensionales, unidades de pantalla táctil y otras estaciones de trabajo. A través de experimentos relacionados, puede familiarizarse con las características de funcionamiento de los actuadores de sistemas neumáticos. Basado en el sistema de control de movimiento Siemens 1200 PLC, pantalla táctil y métodos de comunicación PLC, etc., los estudiantes pueden cultivar los conocimientos y habilidades correspondientes, adecuados para escuelas vocacionales superiores, universitarias, secundarias y carreras relacionadas en escuelas técnicas Enseñanza y evaluación de capacitación de habilidades
1.2 Características
(1) La plataforma de entrenamiento adopta una placa base de aleación de aluminio para construir la plataforma de entrenamiento con una estructura estable. Cada módulo de actuador se coloca en la placa base, que es fácil de usar y no es fácil de dañar.
(2) La distribución de energía y la unidad de control PLC del dispositivo de entrenamiento adoptan el modo de panel de control, la fuente de alimentación del sistema se extrae a través del enchufe de seguridad y el cableado del dispositivo de entrenamiento está conectado a través del cableado, que es seguro y confiable. .
(3) La integración orgánica de la tecnología mecánica (incluida la tecnología neumática), la tecnología de sensores, el control PLC y la tecnología de redes de comunicación refleja las características del proceso de producción de la fabricación moderna. La estructura general adopta un tipo abierto y de desmontaje, que puede reemplazar fácilmente los módulos. El contenido de los módulos se determina de acuerdo con los principios de funciones productivas y funciones de aprendizaje integradas, de modo que los módulos requeridos puedan seleccionarse fácilmente durante la enseñanza o la competencia.
(4) Los terminales de E/S de los módulos PLC maestro y esclavo del dispositivo de capacitación y evaluación están conectados a los interruptores de comando, interruptores fotoeléctricos, sensores y componentes indicadores a través del bloque de terminales.
- Parámetros de rendimiento
(1) Potencia de entrada: sistema trifásico de cinco hilos AAC240V±10% 50Hz
(2) Dimensiones: 1250 mm × 750 mm × 800 mm
(3) Capacidad de la máquina: <1.5KVA
(4) Peso: <80 kg
(5) Condiciones de trabajo: temperatura ambiente -10℃~+40℃ humedad relativa <85% (25℃)
III.Composición del producto
3.1 Unidad de entrada de energía
El terminal de entrada de energía se coloca en el área de distribución de energía en la plataforma de entrenamiento, se conduce a través del enchufe y el suministro de energía total del sistema es controlado por el disyuntor de fuga.
3.2 Mesa de entrenamiento
(1) La plataforma de entrenamiento está compuesta por un sustrato de aleación de aluminio, que se puede colocar sobre una mesa horizontal para experimentos, con una estructura firme y una apariencia hermosa.
(2) Accesorios
Bloquear
Cable
3.3 Parte de distribución de energía
La parte de control de potencia se muestra en la Figura 0,
1- Disyuntor de fugas 2- Fuente de alimentación conmutada 3- Módulo PLC 4- Relé de control 5- Interruptor 6- Bloque de enchufes 7- Módulo de extensión
(1) Entrada de alimentación trifásica de cinco hilos, controlada por un disyuntor.
(2) Equipado con fuente de alimentación conmutada de 24V 3A para objetos de entrenamiento y cargas.
3.4 Configuración del actuador
- Unidad de entrada de aire comprimido
La interfaz de la unidad de entrada de aire comprimido del dispositivo de entrenamiento se muestra en la Figura 1. El aire comprimido se suministra a todos los componentes neumáticos del dispositivo a través de la válvula reductora de presión. El extremo de salida de la válvula reductora de presión está controlado por una válvula, lo cual es conveniente para la depuración del dispositivo. Cuando el sistema esté funcionando, ajuste el valor de presión de la válvula reductora de presión a 0,4 MPa (levante la perilla de ajuste de presión, gire la perilla para ajustar el valor de presión a 0,4 MPa, después de completar el ajuste, presione la perilla hacia abajo para bloquear la perilla y evitar que gire) .
1- Perilla de ajuste de presión 2- Entrada de aire 3- Válvula de conmutación 4- Manómetro
- Unidad de silo
La unidad de silo se utiliza para colocar el bloque cilíndrico de material a transportar. Cuando el sistema está funcionando, el cilindro de empuje empuja el bloque de material hacia la cinta transportadora para su transporte. La unidad de silo se muestra en la Figura 2.
1-Silo de bloques redondos 2-Cilindro de empuje
- Unidad de cinta transportadora
La unidad de cinta transportadora se utiliza para transportar bloques de material cilíndricos. La cinta transportadora se compone de dos secciones, que son impulsadas respectivamente por un motor reductor de CC 1 y un motor reductor de CC 2. La unidad de cinta transportadora se muestra en la Figura 3.
1-Motorreductor CC 1 2-cinta transportadora 1 3-cinta transportadora 2 4-Motorreductor CC 2
- Unidad de manipulación de ventosas de vacío
La unidad de manipulación con ventosas de vacío se utiliza para transportar el bloque de material cilíndrico al palet cuadrado y, a continuación, el módulo de manipulación del robot transporta el palet cuadrado al contenedor de palet cuadrado. Esta unidad se compone principalmente de ventosas de vacío, cilindros giratorios y contenedores de bandejas cuadradas. La unidad de manejo del mandril de vacío se muestra en la Figura 4.
1 silo palet cuadrado 2 ventosas de vacío 3 cilindros giratorios
- Unidad de manejo del manipulador de tres ejes
La unidad manipuladora de manipulación es la parte central del actuador de todo el sistema, que se compone de módulos de movimiento hacia arriba y hacia abajo, módulos de movimiento hacia la izquierda y hacia la derecha, bandejas de cilindros, sensores de posición, etc. Los módulos de movimiento hacia la izquierda y hacia la derecha y el movimiento hacia arriba y hacia abajo los módulos son impulsados respectivamente por servomotores como se muestra en la Figura 5.
1-Servomotor de elevación 2-Lámpara indicadora 3-Movimiento del servomotor izquierdo y derecho 4-Sensor de límite 5-Controlador del servo
- Unidad de almacén estereoscópica
La unidad de almacén tridimensional se compone de posiciones de almacén e interruptores de posición. El almacén tridimensional se divide en cuatro plantas con un total de 32 puestos de almacén. Los bloques de material son transportados en orden a las posiciones correspondientes del almacén por el robot. La unidad de almacén tridimensional se muestra en la Figura 6.
Caracteristicas especfficas
- Alimentacion electrica: 230 Voltio
- Compartimiento de almacenamiento: 32
- Numero de conexiones: 8
- Panel: Tactil
- Presion de trabajo: 6 Bar
- Regulador de ejes: 2 servoreguladores de ejes
- Sistema: Cartesiano de posicion
Caracteristicas adicionales
- Switch de 8 puertos para conexion Ethernet industrial.
- Montado sobre modulo de bandas transportadoras con rodos.
- PLC para control de cintas transportadoras.
- Comunicacion Ethernet.
- Sensores RFID.
Consola de control con panel tactil y paro de emergencia.
- Sistema cartesiano de posicion que consta de: 2 ejes lineales tipo servo; 1 eje lineal neumatico; 1 eje rotativo neumatico; y 1 gripper neumatico.
- Debe almacenar palets junto con piezas desde banda de transporte a cualquiera de las 32 posiciones y debe poder extraer paiets con piezas desde cualquiera de las 32 posiciones hacia la banda de transporte y debe seleccionarse y memorizar la posicion para almacenamiento o extraccion por medio de software MES en un panel HML
- Debe incluir 2 bandas de transporte de palets con actuadores de cinta: 2 motores de 24 V DC.
- Debe incluir puertas transparentes bloqueables con Have.
- Dimensiones: 1200 x 1600 x 1800 mm
- Dos compartimentos de almacenamiento de palets, cada uno de cuatro niveles y en cad a nivel cuatro posiciones de almacenamiento.
- Estructura: chasis de chapa de acero, perfiles de aluminio.
- Gabinete de control integrado con panel de control que debe incluir panel tactil HMI y paro de emergencia y boton de alimentacion de voltaje de todo el sistema.
- Software MES con licencia que permita ver a traves de HMI cuales posiciones estan ocupadas y cuales vacias y se pueda saber que hay almacenado en cada posicion de palets.
- Todos los cables de programacion necesarios entre PC y los equipos.
- Todos los cables de comunicacion mediante protocolo necesarios entre los equipos.
- Induccion en el uso del equipo en industria 4.0.
- Manuales de operacion y mantenimiento.
- Debe incluir induccion en el uso y manejo del equipo.